Geomagnetismo e Mecânica Celeste: Polos, Azimute e Inclinação Orbital
Este artigo técnico explora a complexa interseção entre o geomagnetismo terrestre e a mecânica orbital. Analisamos detalhadamente a divergência entre os polos magnéticos e geográficos (verdadeiros), as formulações matemáticas por trás do azimute e da declinação, e como a inclinação orbital é mensurada em relação à linha do equador. Ideal para desenvolvedores de sistemas embarcados voltados para navegação, telemetria e controle aeroespacial.
1. Introdução aos Sistemas de Referência Terrestre
A navegação precisa e o rastreamento orbital dependem de modelos matemáticos rigorosos e referenciais consistentes. Na engenharia de sistemas embarcados, especialmente no desenvolvimento de Unidades de Medida Inercial (IMUs) e sistemas de controle de atitude de satélites, compreender a diferença entre os eixos de rotação da Terra e seus eixos magnéticos é fundamental. O uso indiscriminado desses referenciais sem as devidas compensações matemáticas pode resultar em erros catastróficos de orientação.
2. O Campo Magnético da Terra e os Polos Magnéticos
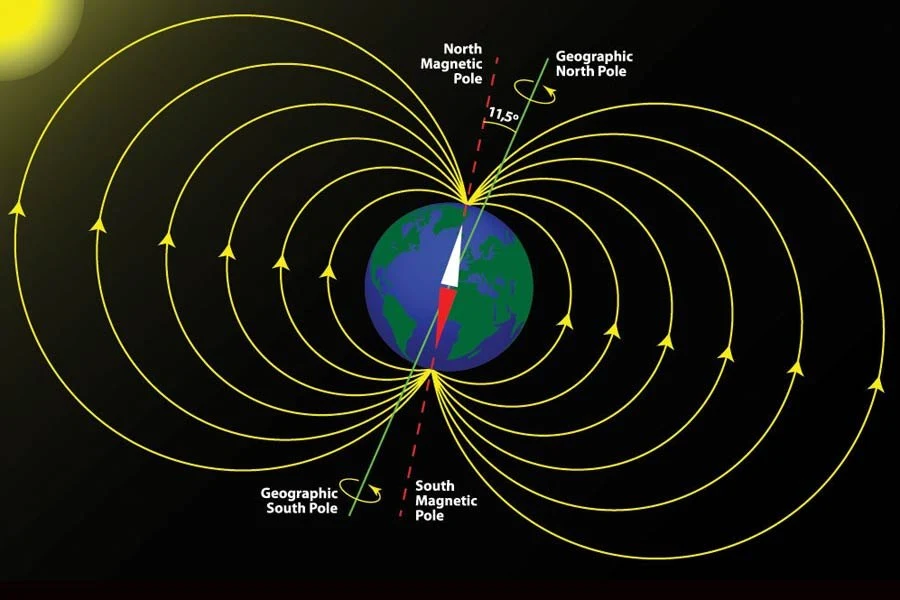
O campo magnético da Terra não é estático nem perfeitamente alinhado com o eixo de rotação do planeta. Ele é gerado pelo movimento convectivo de fluidos condutores (ferro e níquel líquidos) no núcleo externo da Terra, um fenômeno conhecido como teoria do geodínamo.
Os polos magnéticos da Terra são os pontos onde as linhas de fluxo magnético apontam verticalmente para baixo (no Norte) ou para cima (no Sul). Devido à natureza fluida e caótica do núcleo externo, a localização exata desses polos varia com o tempo, um fenômeno chamado de deriva polar ou variação secular.
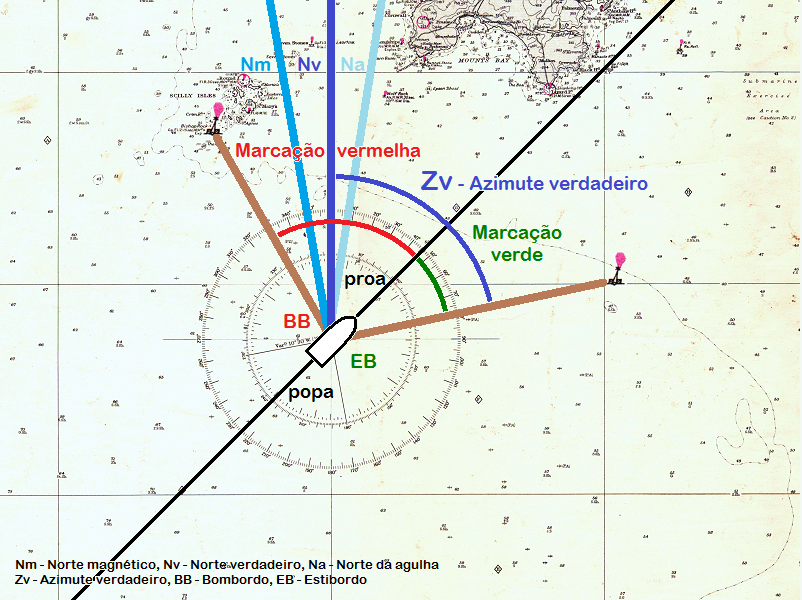
2.1 Declinação Magnética ($\delta$)
Para aplicações de navegação embarcada que utilizam magnetômetros, é vital compreender a Declinação Magnética ($\delta$). Trata-se do ângulo no plano horizontal entre o Norte Magnético (apontado pela bússola) e o Norte Verdadeiro (geográfico). A relação entre o rumo verdadeiro ($\theta_V$) e o rumo magnético ($\theta_M$) é dada por:
3. Polos Verdadeiros (Geográficos) e o Eixo de Rotação
Os polos verdadeiros representam as interseções do eixo de rotação da Terra com sua superfície. O Polo Norte Verdadeiro é o ponto de latitude $90^{\circ}$ N, e é em relação a este eixo que os sistemas de coordenadas geográficas (latitude e longitude) são construídos.
Diferente dos polos magnéticos, os polos verdadeiros apresentam uma variação extremamente pequena, restrita ao movimento conhecido como Oscilação de Chandler e à precessão dos equinócios. Para a grande maioria das aplicações de engenharia civil, aeroespacial e de sistemas, o eixo geográfico é considerado o referencial "absoluto" inercial da superfície.
4. Azimute: O Ângulo de Orientação Horizontal
O azimute é um ângulo formado entre um ponto de referência (geralmente o Norte) e a projeção ortogonal de um ponto de interesse no plano do horizonte do observador. Ele é medido em graus, variando de $0^{\circ}$ a $360^{\circ}$, no sentido horário.
4.1 Cálculo Matemático do Azimute
Na geometria esférica, para calcular o azimute verdadeiro ($\alpha$) de um ponto $A$ (latitude $\phi_1$, longitude $\lambda_1$) para um ponto $B$ (latitude $\phi_2$, longitude $\lambda_2$), utilizamos a trigonometria esférica. Considerando $\Delta\lambda = \lambda_2 - \lambda_1$, a fórmula para o azimute inicial é:
A função atan2(y, x) é amplamente utilizada em linguagens de programação para lidar com a ambiguidade de quadrantes que a função arco tangente tradicional ($\arctan$) apresenta, garantindo que o azimute resultante esteja no quadrante correto.
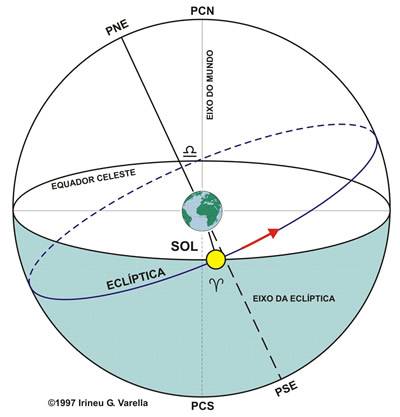
5. Mecânica Celeste: Inclinação Orbital e o Equador Terrestre
A transição da navegação terrestre para a astronáutica exige uma nova mudança de referencial. A inclinação orbital ($i$) é um dos seis Parâmetros Orbitais de Kepler e descreve a inclinação do plano da órbita de um corpo celeste ou satélite artificial em relação a um plano de referência.
Para satélites orbitando a Terra, o plano de referência padrão é o Plano Equatorial da Terra (o plano que contém a linha do equador geográfico).
5.1 Definições Vetoriais da Inclinação
A inclinação é o ângulo diédrico entre o plano do equador e o plano orbital. Matematicamente, a inclinação $i$ varia de $0^{\circ} \le i \le 180^{\circ}$. Ela pode ser calculada com base no vetor do momento angular específico relativo ($\vec{h}$), que é perpendicular ao plano orbital.
Se o vetor momento angular é dado em coordenadas cartesianas no sistema inercial centrado na Terra (ECI) como $\vec{h} = [h_x, h_y, h_z]$, a inclinação é determinada em relação ao componente $z$ (que é perpendicular ao equador):
Onde a magnitude do vetor momento angular é:
Tipos de órbita com base na inclinação em relação ao equador:
- $i = 0^{\circ}$: Órbita equatorial prograda (gira junto com a Terra).
- $0^{\circ} < i < 90^{\circ}$: Órbita prograda ou direta.
- $i = 90^{\circ}$: Órbita polar (passa exatamente sobre os polos verdadeiros).
- $90^{\circ} < i < 180^{\circ}$: Órbita retrógrada (contra a rotação da Terra).
Conclusão
O domínio sobre os referenciais espaciais e magnéticos é o pilar que sustenta o desenvolvimento de tecnologias autônomas, de drones que realizam fotogrametria automatizada a satélites em órbitas geossíncronas. Entender que o magnetismo é uma força dinâmica que se difere fundamentalmente do eixo geográfico e compreender o rigor matemático exigido para calcular azimutes e inclinações orbitais (em relação ao plano equatorial) garante a resiliência de projetos eletrônicos embarcados contra falhas de orientação.
bitandsolder.com — Engenharia, eletrônica e sistemas embarcados


